
Obtention des vecteurs position, vitesse et accélération d’un mobile à partir de son horaire
par bernard.vuilleumier
Exercice extrait de J.-A. Monard, Mécanique.
Un mobile se déplace selon l’horaire :

En dérivant l’horaire donnant le vecteur position par rapport au temps, on obtient l’horaire donnant le vecteur vitesse :

Et en dérivant l’horaire donnant le vecteur vitesse par rapport au temps, on obtient l’horaire donnant le vecteur accélération :

Chacune de ces égalités vectorielles peut s’écrire en composantes :
– x(t) = 0.1 t3 - 0.4 t
– y(t) = 0.8 t
– vx(t) = 0.3 t2 - 0.4
– vy(t) = 0.8
– ax(t) = 0.6 t
– ay(t) = 0
Définissons l’horaire r(t) dans Mathematica et calculons les composantes du vecteur position. Les composantes du vecteur vitesse s’obtiennent en dérivant une fois cet horaire par rapport au temps v(t) = r’(t) et les composantes du vecteur accélération en le dérivant deux fois a(t) = r’’(t).
N. B. Le code qui se trouve dans les cadres ci-dessous peut être copié collé dans Mathematica pour être exécuté.
A = {0.1, 0};
B = {-0.4, 0.8};
r[t_] := A*t^3 + B*t
tinit = -3;
tfinal = 3;
deltat = 1;
rxy = Table[r[t], {t, tinit, tfinal, deltat}];
vxy = Table[r'[t], {t, tinit, tfinal, deltat}];
axy = Table[r''[t], {t, tinit, tfinal, deltat}];
TableForm[
Transpose[{{Range[tinit, tfinal, deltat]}, {rxy}, {vxy}, {axy}}],
TableHeadings -> {None, {"t", "rxy", "vxy", "axy"}}]En copiant-collant le code ci-dessus dans Mathematica et en l’exécutant, on obtient le tableau qui donne les composantes de chaque vecteur en fonction du temps.
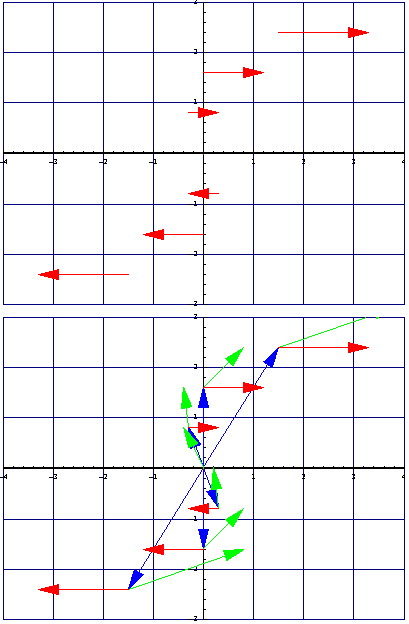
Vecteur position. vecteur vitesse et vecteur accélération : en bleu, vecteur position, en vert, vecteur vitesse et en rouge vecteur accélération du mobile.